


电动机保护装置系列


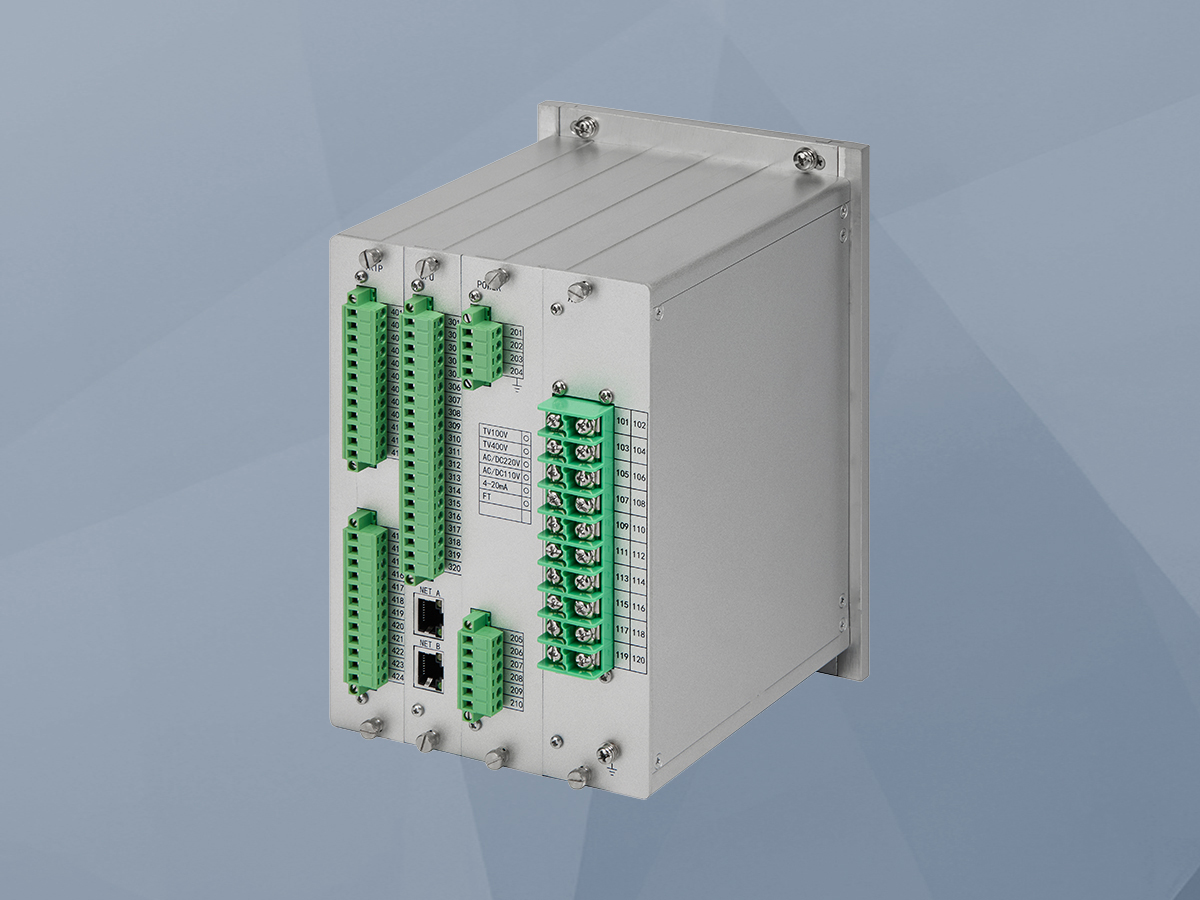
TYM8693A电动机磁平衡式差动保护装置
设备简介:电动机磁平衡式差动保护装置(俗称“小差动保护”)是一种专为高压、大容量三相异步电动机设计的主保护设备。其核心采用特殊的磁平衡电流互感器,将电动机每相绕组的始端与中性点端引线以相反方向共同穿过同一互感器窗口。在电动机正常或启动时,一进一出的电流磁通相互抵消,装置不动作;当电动机内部发生相间或接地短路时,电流平衡被破坏,互感器二次侧产生差动电流驱动保护快速跳闸。
适用电动机:额定电压3kV、6kV、10kV及以下,额定容量在2000kW及以上,或容量虽小但常规电流速断保护灵敏度不足的高压异步电动机、同步电动机。
典型场景:火力发电厂的引风机、送风机、循环水泵、凝结水泵;石油化工行业的压缩机、大型泵组;冶金行业的高炉鼓风机、轧钢主传动电机;煤矿的主通风机、排水泵;水电站的辅机系统等关键高压电动机。
相关案例








-

Q:储能电站和光伏电站以及风电厂的一次调频和AGCAVC系统有什么区别不同?
一次调频、AGC、AVC 在光伏/风电/储能场站中分工不同:一次调频毫秒级自主应急调有功,AGC 分钟级跟踪调度精调频率,AVC 专管无功稳压。本文对比三者原理、响应速度、设备载体及35kV/10kV并网配置差异。本文将从原理、响应速度、调节能力、实现成本和运行约束四个维度,对这三类电源进行一次系统的横向比较。
2026-07-27
Q:虚拟电厂多合一控制终端是什么?一台设备如何取代五台屏柜?
本文对虚拟电厂的多合一控制终端做了一个详细的说明介绍,虚拟电厂融合控制终端就是把远动通讯、通讯采集、加密、5G/4G路由/AGVC控制全部通过一台装置集成到一起,达到高度集成融合的一个设备。采集电厂的数据传给后台系统,达到可以观测调控的一个目的。
2026-07-15
Q:光伏场站为什么要参与一次调频?
光伏场站参与一次调频已成并网刚需。本文深度剖析其背后的电网安全、政策合规、经济账与技术演进四大驱动力,并详解下垂控制、虚拟惯量等技术路径。点击了解如何实现合规与增收双赢。
2026-07-14
相关问答咨询
更多
-

分布式光伏场站群调群控装置如何实现AGC/AVC功能
分布式光伏场站群调群控装置通过调度IEC 104/61850下发有功/电压目标值,装置按逆变器额定容量比例分配指令(Modbus/104下行),闭环执行AGC恒有功/恒功率因数、AVC恒电压/恒无功,完成“四可”可调可控。本文讲清10kV光伏AGC强制背景、群调群控三层架构(调度-协调装置-逆变器/SVG)、AGC/AVC算法逻辑及并网验收指标(响应≤200ms、精度±1%)
2026-07-27
A类电能质量在线监测装置:功能、原理与作用深度解析
深度解析A类电能质量在线监测装置的功能、原理与作用。详解A级电能质量在线监测装置的同步采样原理,±0.1%电压精度及1024点/周波暂态捕捉能力。阐述其在新能源并网验收、电能质量纠纷仲裁、半导体产线保护中的核心价值,了解更多A类电能质量在线监测装置的信息请登录网站。
2026-07-13
什么是A类的电能质量在线监测,A类和B类S类有什么区别?
本文介绍了什么是A类电能质量在线监测装置,区分了A类和B类S类电能质量在线监测装置的功能,以及应用场景、主要功能、参数的区别和不同。阐述了如何在不同的场景中选取正确的电能质量在线监测装置。
2026-07-13
相关技术文章
更多